OpenCV 第四/五天
第四天:数据结构
声明Point类: PointNX, 例Point2f, Point3f
声明Mat类时, 需要指明数据类型和通道数: CV_{8U,16S,16U,32S,32F,32F,64F}, CV_{1,2,3,(N)}
一大堆函数…
计算一个3×3 fl[……]
声明Point类: PointNX, 例Point2f, Point3f
声明Mat类时, 需要指明数据类型和通道数: CV_{8U,16S,16U,32S,32F,32F,64F}, CV_{1,2,3,(N)}
一大堆函数…
计算一个3×3 fl[……]
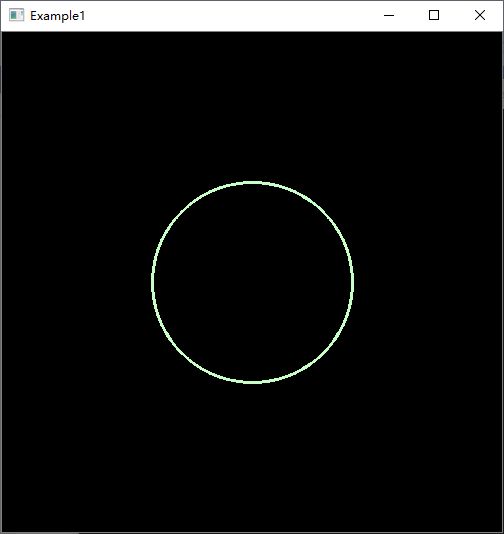
>> \source\repos\opencvtest\x64\Debug> .\opencvtest.exe 1.jpg
下载OepnCV
加入Path
创建VS项目
在属性管理器中新建Opencv.props, 添加Include, lib
在包含目录添加(根据自己实际安装目录)
.\Opencv4.1\opencv\build\include
.\Opencv4.1\opencv\bui[……]
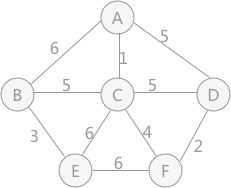
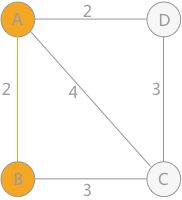
克鲁斯卡尔算法,从边的角度求网的最小生成树,时间复杂度为O(nlogn)。和普里姆算法恰恰相反,更适合于求边稀疏的网的最小生成树。
对于任意一个连通网的最小生成树来说,在要求总的权值最小的情况下,最直接的想法就是将连通网中的所有边按照权值大小进行升序排序,从小到大依次选择。
由于最小[……]
最小生成树(minimum spanning tree)是由n个顶点, n-1条边, 将一个连通图连接起来, 且使权值最小的结构。
最小生成树可以用Prim(普里姆)算法或kruskal(克鲁斯卡尔)算法求出。
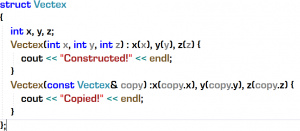
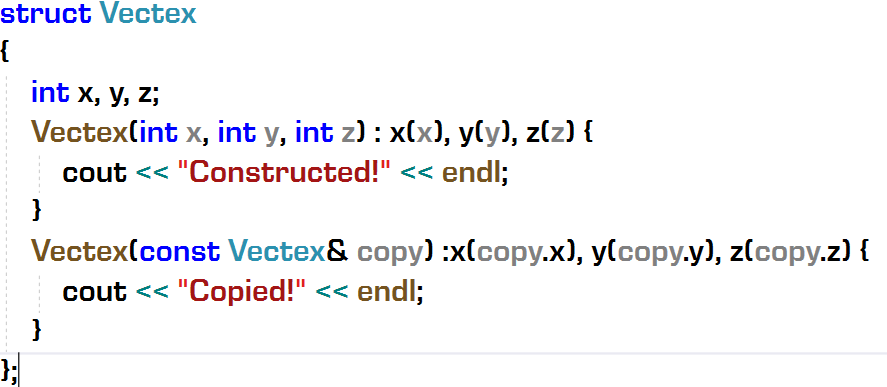
这个结构,由两个构造器组成, 第一个在被构造后显示“Constructed!”, 而第二个则是接受一个在别处声明过的Vectex结构再被传入Vectex中(Copy), 被Copy后会[……]